Ce projet fût réalisé pour caractériser et tester le système « Fine Guidance Sensor » du télescope spatial James Webb. Néosoft a travaillé sur ce projet pour développer une application utilisée pour aligner les différents télescopes montés dans une structure d’aluminium prévue pour simuler les conditions spatiales (Vaccum à -250°C). Un des objectifs du système était de trouver la position exacte de chaque télescope avec une précision de quelques micromètres. La structure d’aluminium se déforme et se contracte lorsque la température diminue, ce qui change l’alignement des télescopes. Notre système est utilisé pour surveiller tous les paramètres en temps réel, l’alignement du télescope et les caractéristiques optiques du faisceau lumineux au fur et à mesure que la température de la structure varie entre -250°C et +70°C. Cette structure, avec les télescopes est présentée dans la Figure 1.
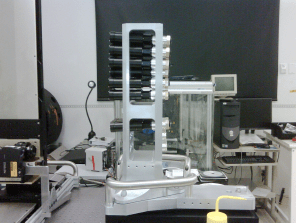
Figure 1 – Structure d’aluminium avec simulateurs de télescope
Le système est constitué de deux caméras CCD, la première avec une lentille et l’autre sans lentille, montées sur une plateforme amovible à 3 axes (axe X, axe Y et axe Z pour le focus). Les 3 axes bougent simultanément dans des directions différentes afin de trouver le faisceau lumineux généré par chaque télescope. Pour ce faire, les images étaient prises périodiquement et analysées pour déterminer la position du faisceau lumineux projeté ainsi que ses caractéristiques optiques. Le module de développement Vision de NI a été utilisé afin de réaliser l’acquisition des images et leur traitement, ce qui incluait un algorithme « centroïde » personnalisé, pour trouver le centre du faisceau lumineux. Le système doit prendre des mesures en continu afin de pouvoir observer les variations. De plus, les mesures sont prises à plusieurs reprises afin de valider l’extrême précision des résultats (au micromètre près). La position de chaque télescope est alors enregistrée dans un fichier pour des analyses futures. La Figure 2 représente une image typique d’un télescope, tel que vu par la caméra CCD.
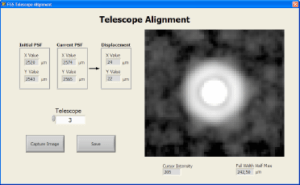
Figure 2 – Image d’un télescope
Cette image est analysée par le logiciel pour déterminer plusieurs valeurs telle que la répartition des points focaux optiques (PSF), le centroïde, l’intensité, et l’ellipsoïde.
Le logiciel a été développé en utilisant LabVIEW 8.6, le module de développement Vision de NI et avec LabVIEW IMAQdx. Le logiciel fonctionne sur un ordinateur portable utilisant Windows XP comme système d’exploitation. La plateforme amovible est contrôlée par communication série RS-232. La Figure 3 montre l’interface visuelle du système d’alignement FGS.
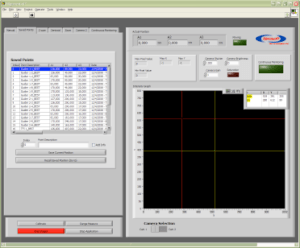
Figure 3 – Interface visuelle du système d’alignement FGS
Besoin d’informations complémentaires ?
Remplissez notre formulaire et l’un de nos experts vous recontactera au plus vite.
Site web développé par
Need more information?
Fill in our online contact form and one of our expert will contact you.
Website developed by